GOAL: Investigate how virtual hand representations affect near-field interactions in dynamic scenarios.
Description: We conceptualized, designed, and evaluated the efficacy of different virtual hand representations in performing a collision avoidance based object retrieval task. Using the HTC Vive controllers and a Noitom hi-fidelity data glove, we built a Unity 3D application on the Vive Pro head mounted display. A study was conducted to compare and understand how user perceptions, interactions, embodiment, and workload are affected as a result of these representations.
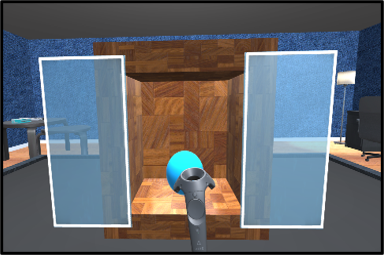
Controller (using a controller represented as a controller)
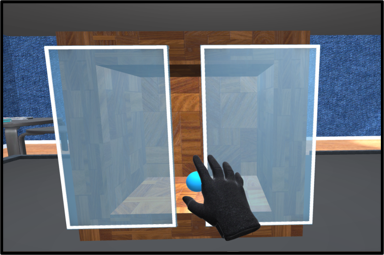
Controller-hand (using a controller represented as a hand)
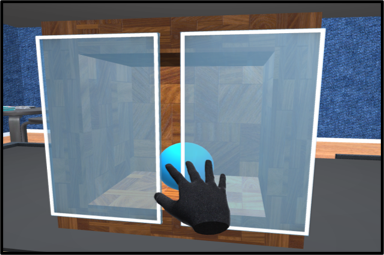
Glove (using a data glove represented as a hand)
Investigation