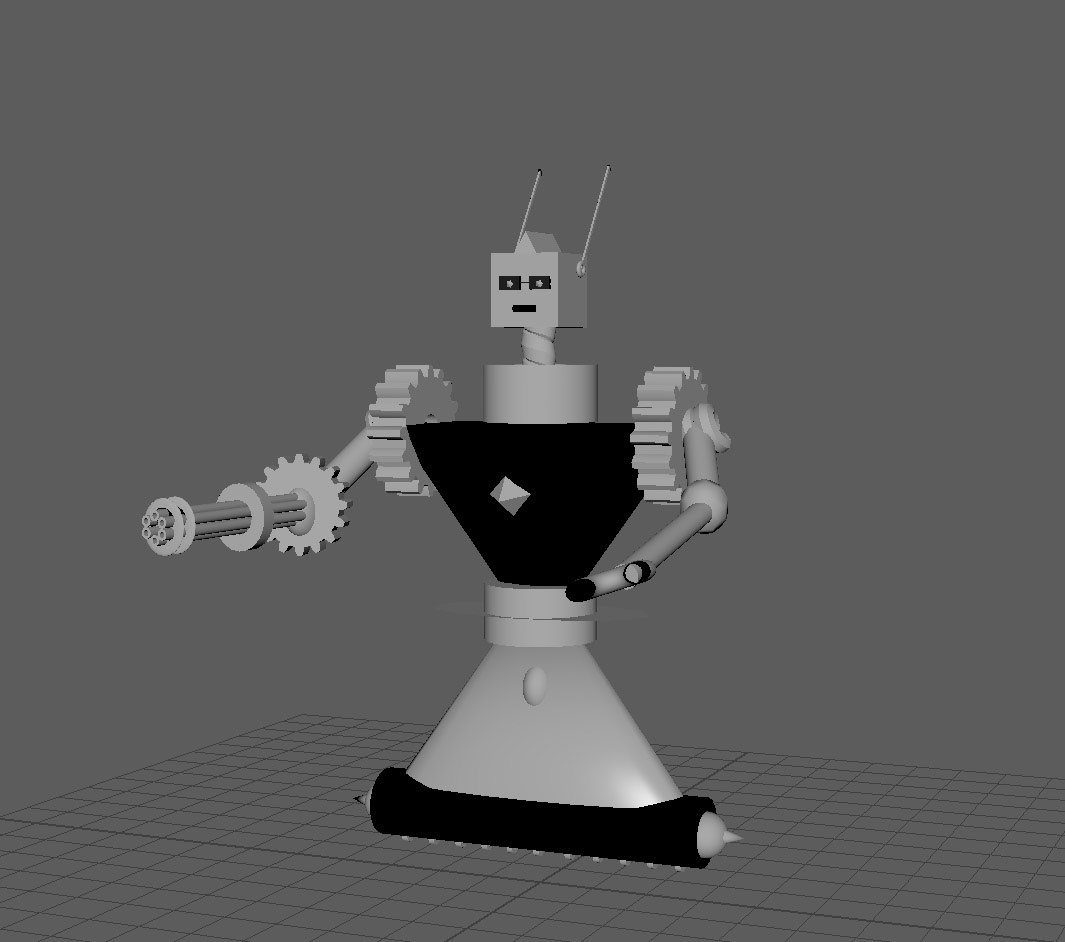
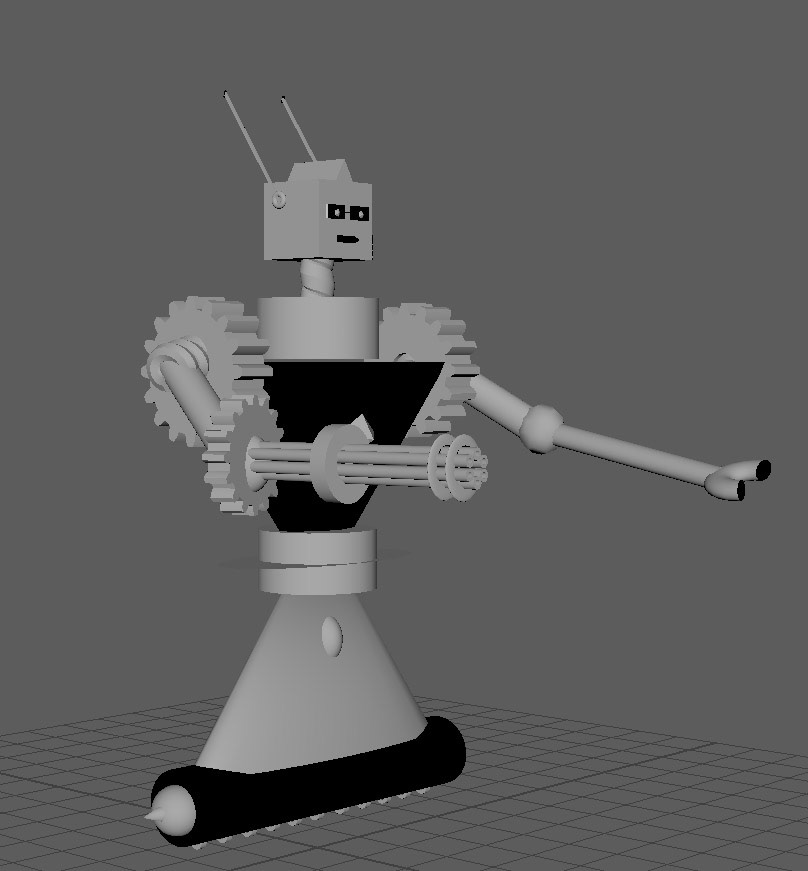
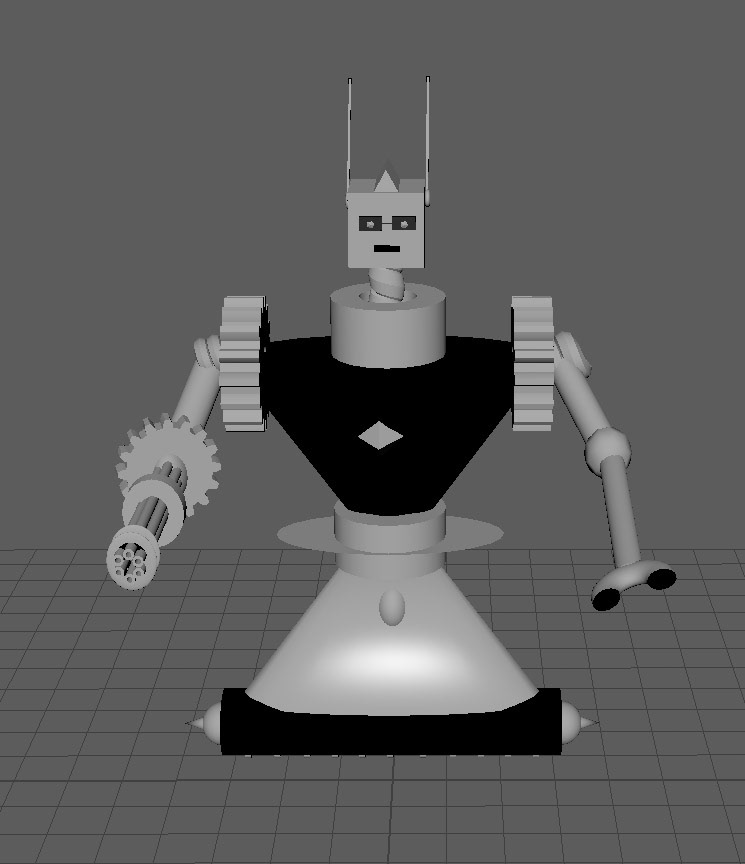
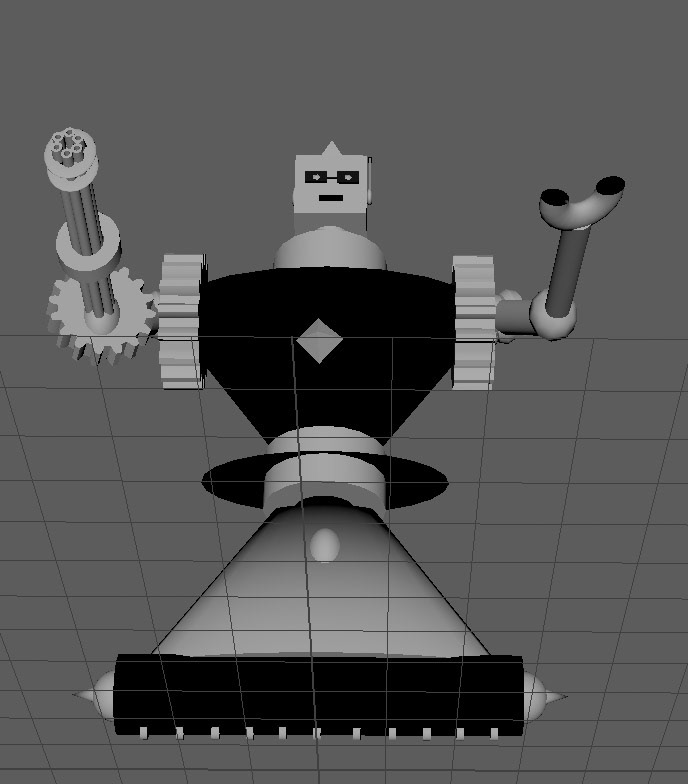
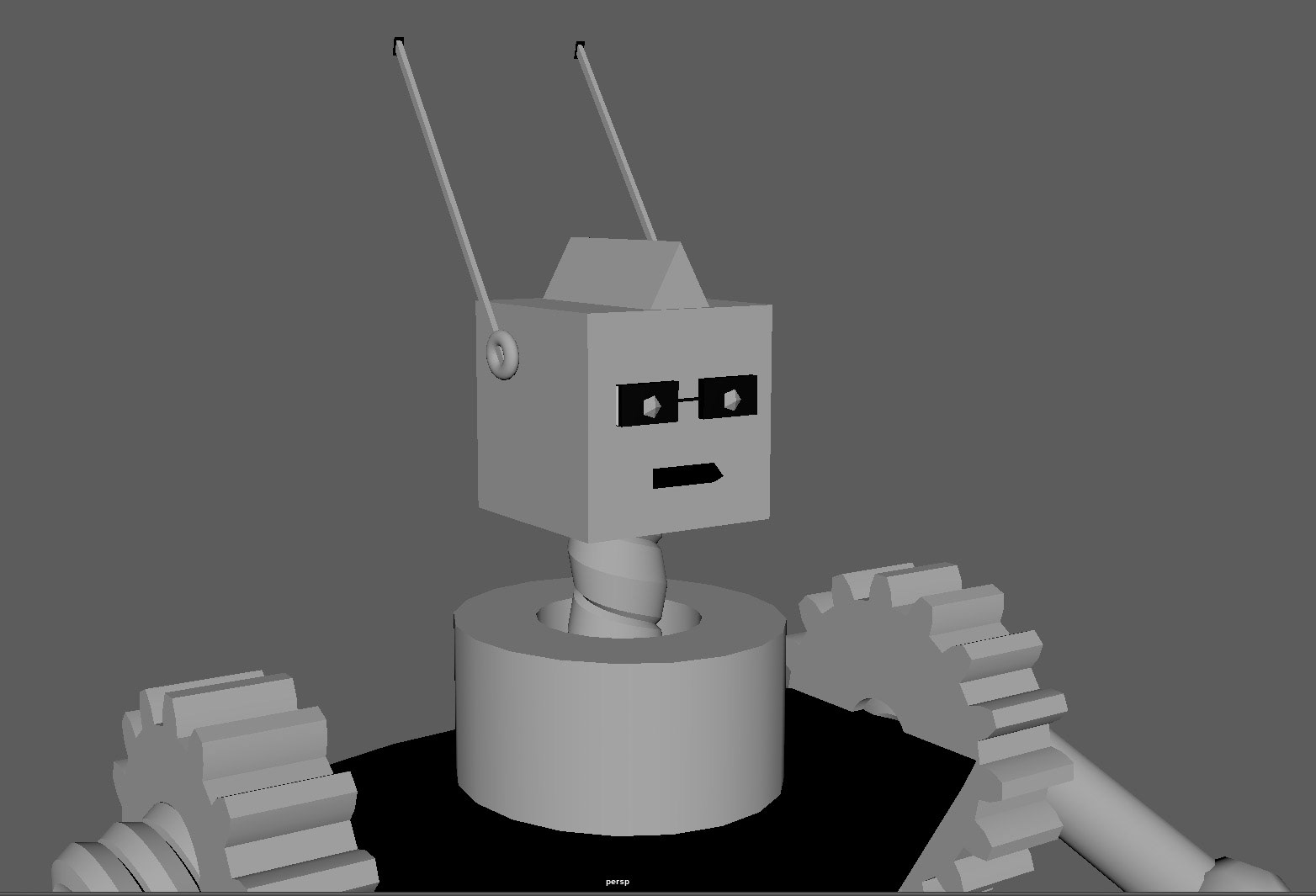
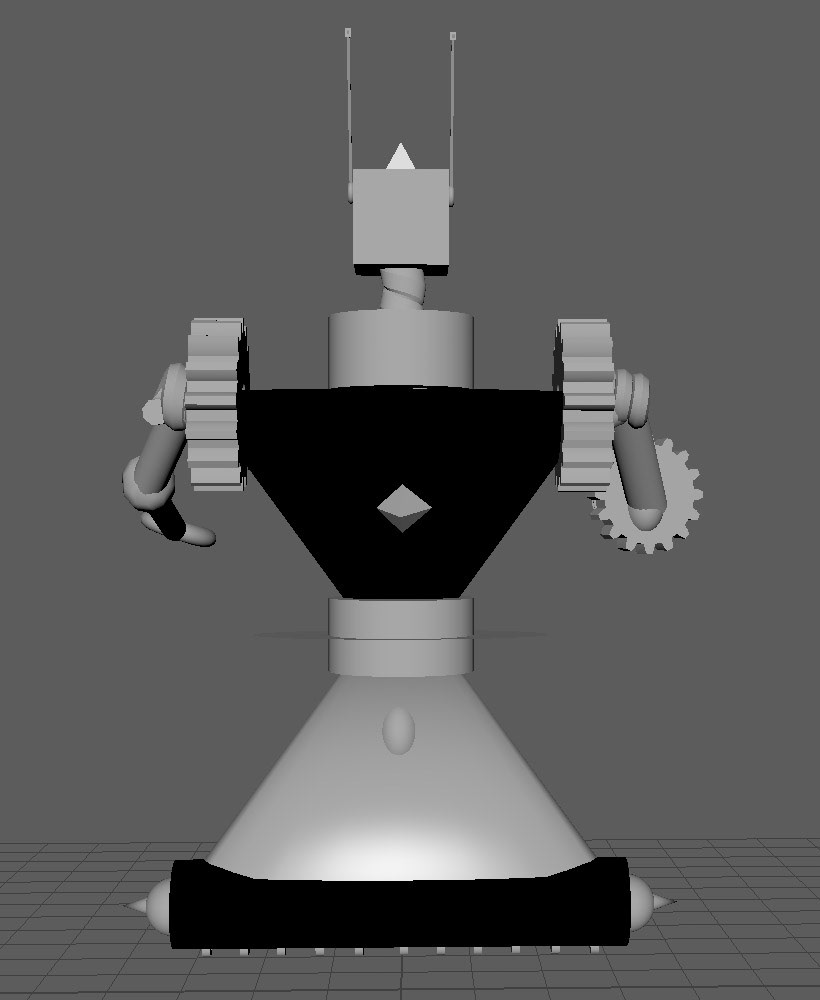
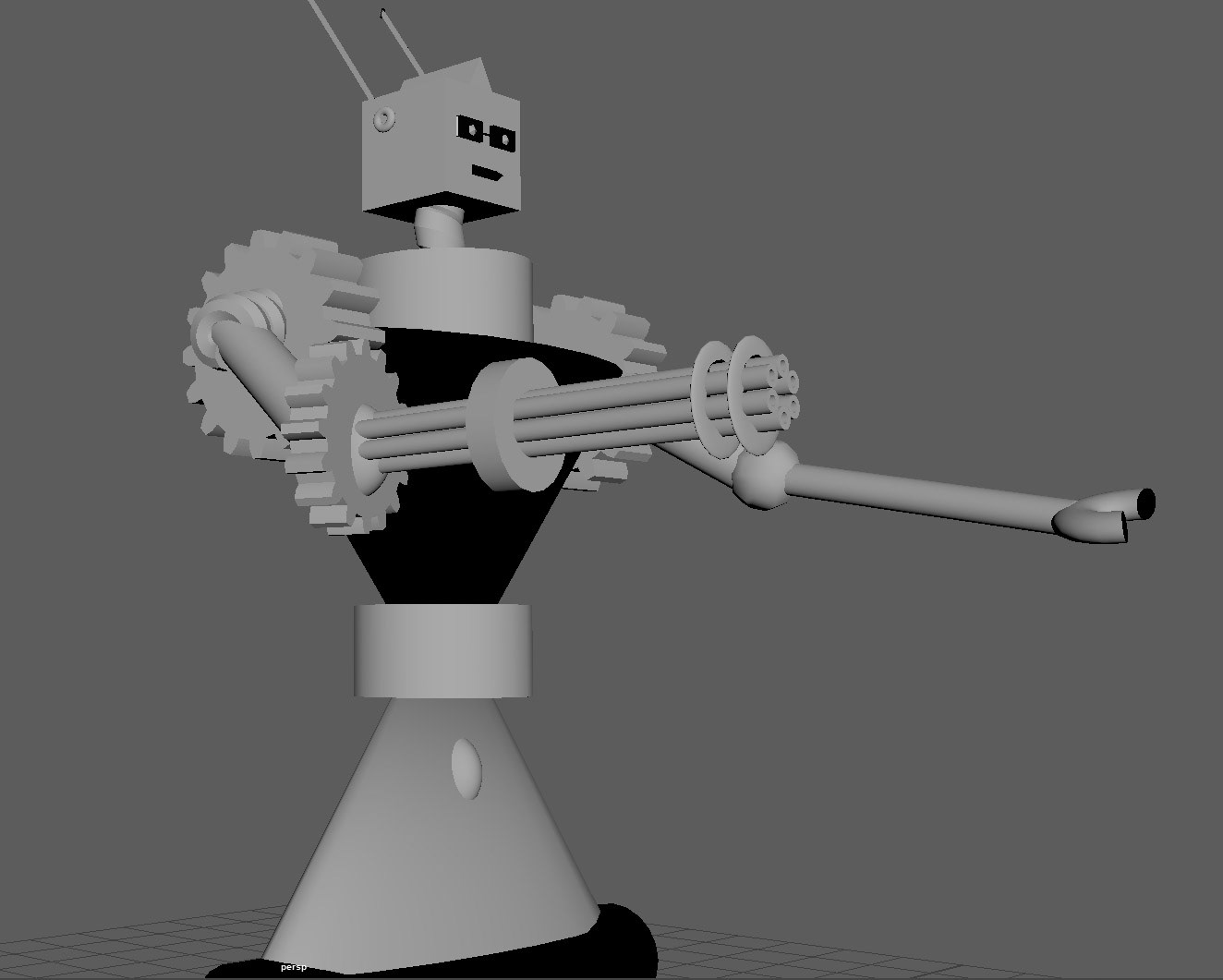
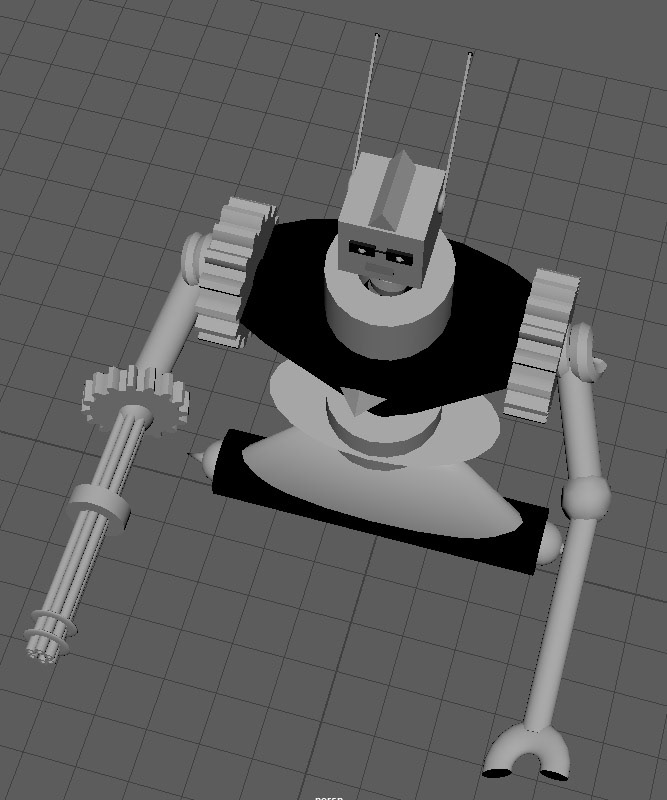
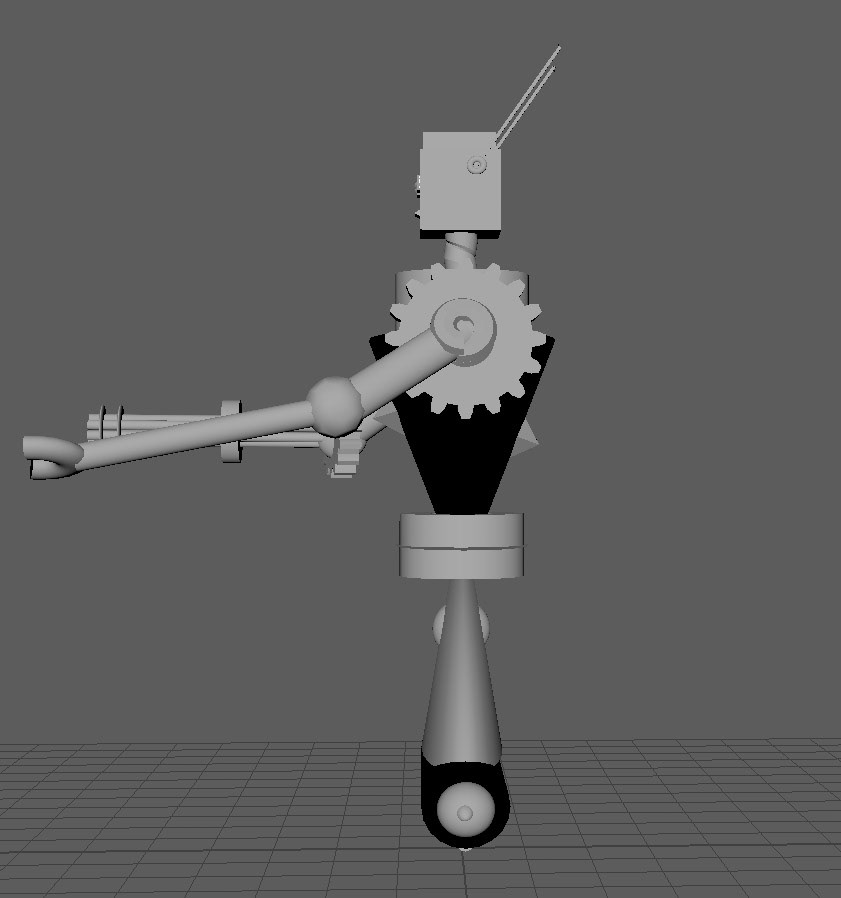
Challenge: Build a Robot using primitives restricting yourself to translation, rotation and scaling. Meet Dr. "I-am-not-a" "Robot". Yes that's right- his first name is "I-am-not-a" and his second, "Robot". He has the ability to fight crime with his machine gun and help around the home too. With his antenna, he can pick up almost any useful signal. I made use of the following primitives: Sphere, Cube, Cylinder, Cone, Torus, Plane, Disc, Platonic solid, Pyramid, Prism, Pipe, Helix, Gear, Soccer ball, Super Ellipse, Spherical Harmonics, Ultra shape. Try and pick 'em out :)